Panda Roboter: Unterschied zwischen den Versionen
(Die Seite wurde neu angelegt: „Daten: {| class="wikitable" |Maximale Reichwiete |855mm |- |Achsen |7 mit Gelenk-Drehmomentsensoren |- |Maximale Tragkraft |3kg |- |Wiederholunpräzision | +/-…“) |
|||
| (13 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
| − | + | [[Datei:FRANKA EMIKA Panda.jpg|mini]] | |
| + | |||
| + | == Eckdaten == | ||
{| class="wikitable" | {| class="wikitable" | ||
|Maximale Reichwiete | |Maximale Reichwiete | ||
| Zeile 16: | Zeile 18: | ||
|2m/s | |2m/s | ||
|} | |} | ||
| − | + | ||
| + | [https://prezi.com/a3wsxetf54yr/panda-roboterarm-einfuhrung-happylab-berlin/Einschulungspräsentation Einschulungspräsentation Wien] | ||
| + | |||
| + | |||
| + | == Checkliste == | ||
| + | *Sichtkontrolle. Ist alles in Ordnung? | ||
| + | *Alles aus dem Weg stellen. Maximale Reichweite 855mm. | ||
| + | *Beachten, dass der Roboterarm ausschwenken kann. | ||
| + | *Roboterarm einschalten mit der Mitgliedskarte | ||
| + | *Laptop einschalten / Happylab User auswählen | ||
| + | *Chrome-Browser öffnen, NICHT Safari und https://robot.franka.de/ aufrufen. | ||
| + | ** Das ist keine sichere Verbingund => Diese Warnung einfach mit "Erweitert" und dann "weiter zu 192..." übergehen | ||
| + | *Username: happylab | ||
| + | *Passwort: happylab42 | ||
| + | *Click to unlock joints (Rechts in der Software) | ||
| + | *Jetzt kann man den Roboterarm programmieren. | ||
| + | |||
| + | <gallery widths="500" heights="300"> | ||
| + | Datei:Chrome .jpg|Browser Chrome / Franke Website aufrufen | ||
| + | Datei:Nicht sicher.jpg|Verbindung nicht sicher umgehen | ||
| + | Datei:Sicher.jpg|Verbindung nicht sicher umgehen | ||
| + | Datei:Unlock.jpg|Unlock Joints | ||
| + | Datei:Unlock2.jpg| Unlock Joints bestätigen | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | '''Toubleshooting''' | ||
| + | |||
| + | * Panda leuchtet gelb. | ||
| + | * Schalte den externen Aktivierungsschalter ein und wieder aus (das System muss beide Zustände des Schalters gesehen haben bevor die Bremsen geöffnet werden können). | ||
| + | * Außerdem muss der externe Aktivierungsschalter geschlossen sein bevor sich die Bremsen via Desk öffnen lassen. Überprüfe, ob sich die Anzeigen in der Fußzeile von Desk verändern - hier ist stets der Status des Sicherheitsblockiersystems, wie auch des externen Aktivierungsschalters als Ampel visualisiert. | ||
| + | |||
| + | == Benutzerhandbuch - User Manual == | ||
| + | [[Datei:Panda research - Benutzerhandbuch DE.pdf|ohne|mini|Benutzerhandbuch DE]] | ||
| + | [[Datei:Panda Robot Manual English.pdf|ohne|mini|Manual EN]] | ||
| + | [[Kategorie:Elektronik]] | ||
Aktuelle Version vom 28. Februar 2025, 15:14 Uhr

Eckdaten
| Maximale Reichwiete | 855mm |
| Achsen | 7 mit Gelenk-Drehmomentsensoren |
| Maximale Tragkraft | 3kg |
| Wiederholunpräzision | +/-0.1mm |
| Geschwindigkeit | 2m/s |
Checkliste
- Sichtkontrolle. Ist alles in Ordnung?
- Alles aus dem Weg stellen. Maximale Reichweite 855mm.
- Beachten, dass der Roboterarm ausschwenken kann.
- Roboterarm einschalten mit der Mitgliedskarte
- Laptop einschalten / Happylab User auswählen
- Chrome-Browser öffnen, NICHT Safari und https://robot.franka.de/ aufrufen.
- Das ist keine sichere Verbingund => Diese Warnung einfach mit "Erweitert" und dann "weiter zu 192..." übergehen
- Username: happylab
- Passwort: happylab42
- Click to unlock joints (Rechts in der Software)
- Jetzt kann man den Roboterarm programmieren.
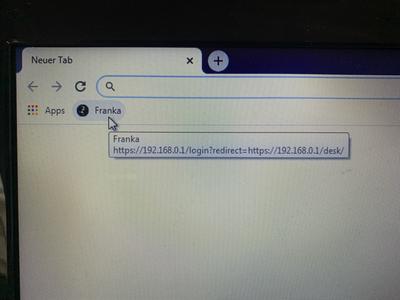
Browser Chrome / Franke Website aufrufen
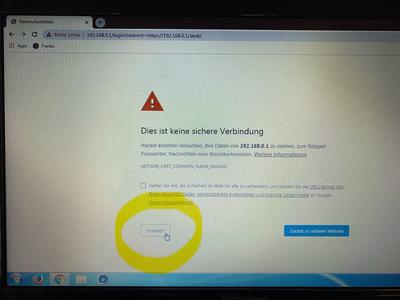
Verbindung nicht sicher umgehen
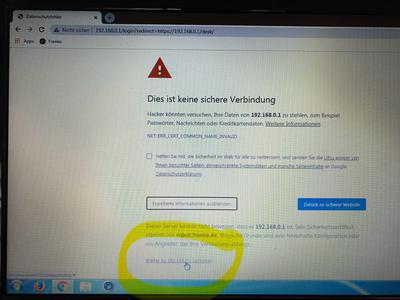
Verbindung nicht sicher umgehen

Unlock Joints
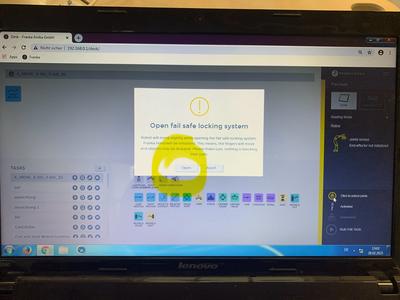
Unlock Joints bestätigen





Toubleshooting
- Panda leuchtet gelb.
- Schalte den externen Aktivierungsschalter ein und wieder aus (das System muss beide Zustände des Schalters gesehen haben bevor die Bremsen geöffnet werden können).
- Außerdem muss der externe Aktivierungsschalter geschlossen sein bevor sich die Bremsen via Desk öffnen lassen. Überprüfe, ob sich die Anzeigen in der Fußzeile von Desk verändern - hier ist stets der Status des Sicherheitsblockiersystems, wie auch des externen Aktivierungsschalters als Ampel visualisiert.

